
本文要点:
在环境条件下对宏观表面进行宏观超润滑,该润滑是在新开发的由多层石墨烯(MLG)涂层的摩擦学系统上进行的。
一、成果简介
摩擦和磨损是运动中的机械部件耗能的主要方式。为了节省能源和环境效益,超润滑是非常需要的。宏观上的超润滑性以前是在特殊环境下或在弯曲的纳米级表面上进行的。然而,除了在环境条件下在宏观表面上,还没有表现出宏观的超润滑性,除了在通过将水蒸气吹入摩擦计腔中而产生的潮湿空气中。在这项研究中,使用石墨烯涂层板(GCP),石墨烯涂层微球(GCS)和石墨烯涂层球(GCB)制造的摩擦系统。在35mN以下的空气中以0.2mms-1的滑动速度获得0.006的摩擦系数在已开发的GCB / GCS / GCP系统中持续1200s。据了解,首次报道了在环境条件下宏观表面的宏观超润滑性。宏观上的超润滑机理是由于剥落的石墨烯薄片与GCS的摆动和滑动的结合所致,通过实验测量,从头算和分子动力学模拟得到证明。这些发现有助于将超大规模的超润滑性与实际应用联系起来,有可能极大地节省能源并减少对环境的二氧化碳排放。
本文在环境条件下对宏观表面进行宏观超润滑,该润滑是在新开发的由多层石墨烯(MLG)涂层的摩擦学系统上进行的。MLG是由等离子体增强CVD(PECVD)沉积的,该等离子体由CVD驱动,在900°C时由射频驱动在石英和二氧化硅(SiO 2)表面上,而催化剂和后转移技术都没有这种方法。PECVD 通过射频功率在900°C下分解甲烷(CH 4),形成石墨烯的碳(C)源。不需要像传统CVD中使用的金属催化剂或导电基材。从头算和分子动力学(MD)模拟阐明了宏观超润滑的基本机理。
二、图文导读
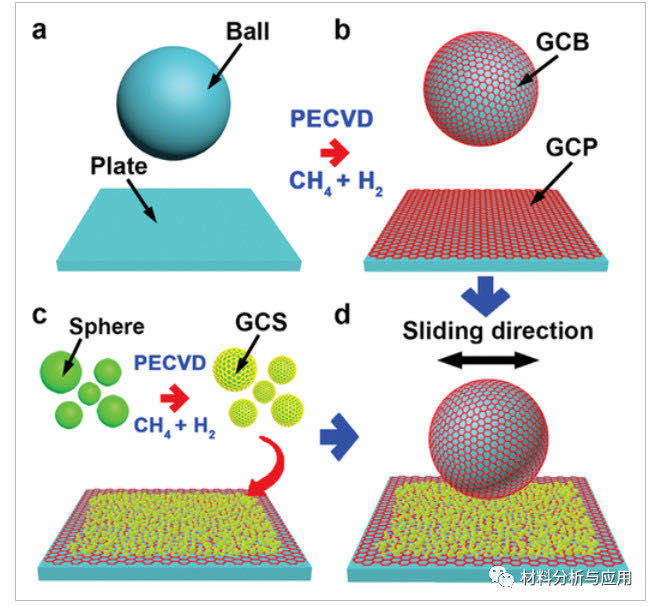
图1. 宏观超润滑系统的制造过程示意图
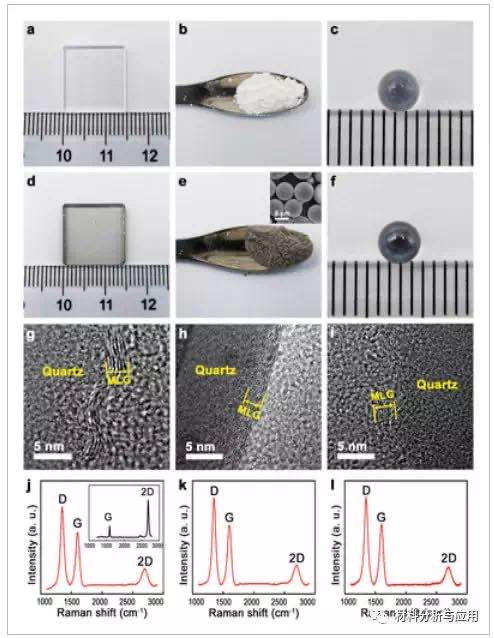
图2. a)石英板,b)SiO 2粉末和c)石英球,以及石墨烯沉积后的d)GCP,e)GCS和f)GCB的照片,g–i)分别是相应的TEM图像和j –l)分别对应拉曼光谱。(e)中的插图是相应的SEM图像。(j)插图显示了标准高质量单层石墨烯的拉曼光谱。
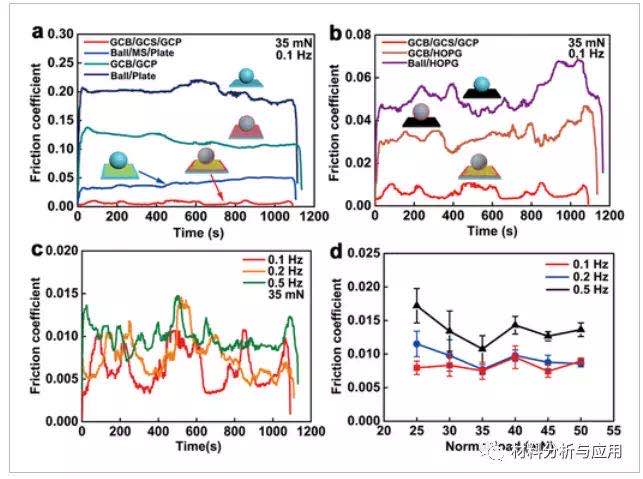
图3. a)GCB / GCS / GCP,钢球/ MS /平板,GCB / GCP,钢球/平板的摩擦系数,b)GCB / GCS / GCP,GCB / HOPG,钢球/ HOPG作为时间的函数以及摩擦系数GCB / GCS / GCP为c)时间的函数和d)不同滑动频率下的正常负载。
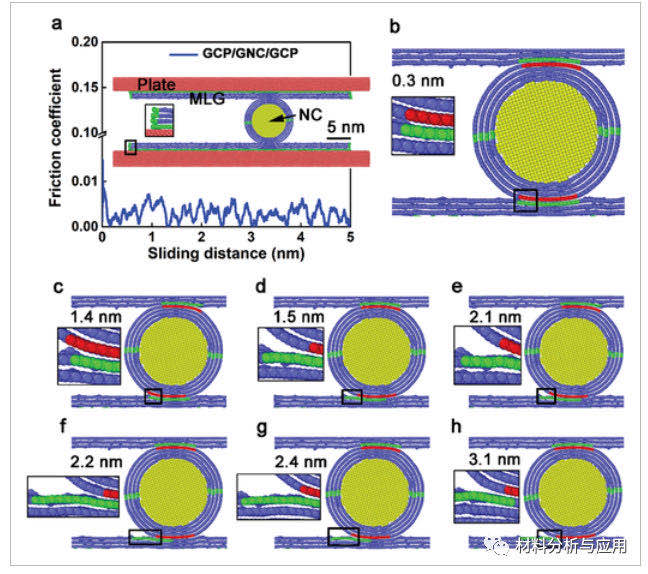
图4. a)摩擦系数与滑动距离的关系,以及石墨烯包裹的顶板在b)0.3,c)1.4,d)1.5,e)2.1,f)2.2,g)2.4处的原子构型快照, h)3.1 nm。
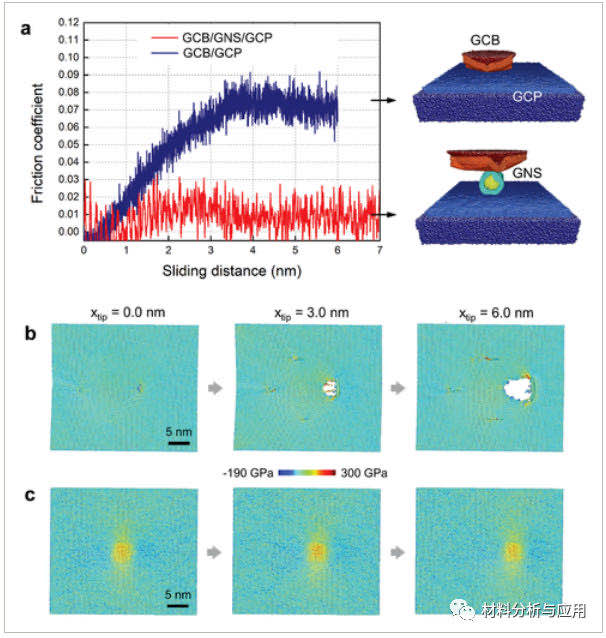
图5. a)GCB / GCP和GCB / GNS / GCP的摩擦系数与滑动距离的关系,以及附着在平板上的最上层石墨烯片在不同距离下的典型原子构型b)不使用cNS和使用GNS。a)深红色,橙色,青色,黄色,浅蓝色和深蓝色指的是刮擦笔头,笔尖上的MLG,分别包裹在板和板上的NS,NS,MLG上的MLG。b,c)根据静水压力对颜色进行编码,具有正值和负值的原子分别对应于拉伸应力和压缩应力。
三、小结
总之,在管式炉中通过PECVD同时制造GCB / GCS / GCP摩擦学系统,其中没有金属催化剂和后转移过程。在环境条件下,通过MLG涂层的平板石英板上可实现宏观超润滑性,其中正常载荷在0.2 mm s -1的滑动速度下从25到50 mN不等持续1200秒。滑动后,通过添加GMS可以改善GCB磨损区域和GCP磨损轨迹上的缺陷,如拉曼光谱所证实的。大型超润滑系统中GCB和GCP的磨损是最低的,与在相同滑动条件下的其他系统相比,这是很难分辨的。根据观察到的宏观超润滑性的实验条件,使用从头算和MD模拟来阐明超润滑的机理。发现GCS的摆动和滑动对于实现超润滑起关键作用。结果为具有宏观超润滑性的高性能设备的设计和制造以及节能和减少对环境的排放铺平了道路。
文献:Macroscale Superlubricity Enabled by Graphene‐Coated Surfaces
